
RoboNav Data Collection
This site contains a collection of the datasets recorded within the RoboNav project. The description of the file formats and contents can be found in the separate Dataset descriptions.
Robot Locomotion Data
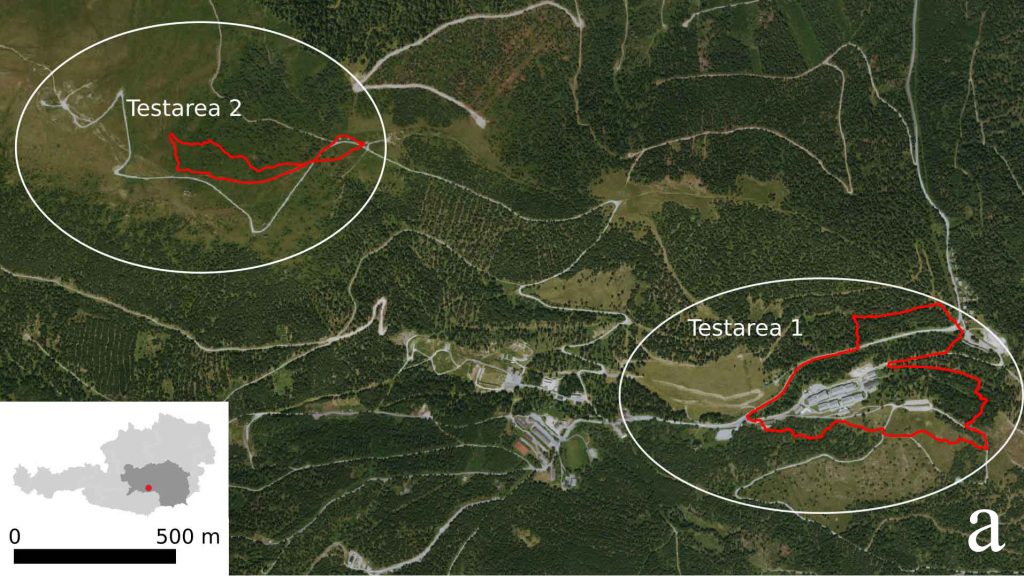
This dataset was recorded in June 2022 on the Seetaler Alps.
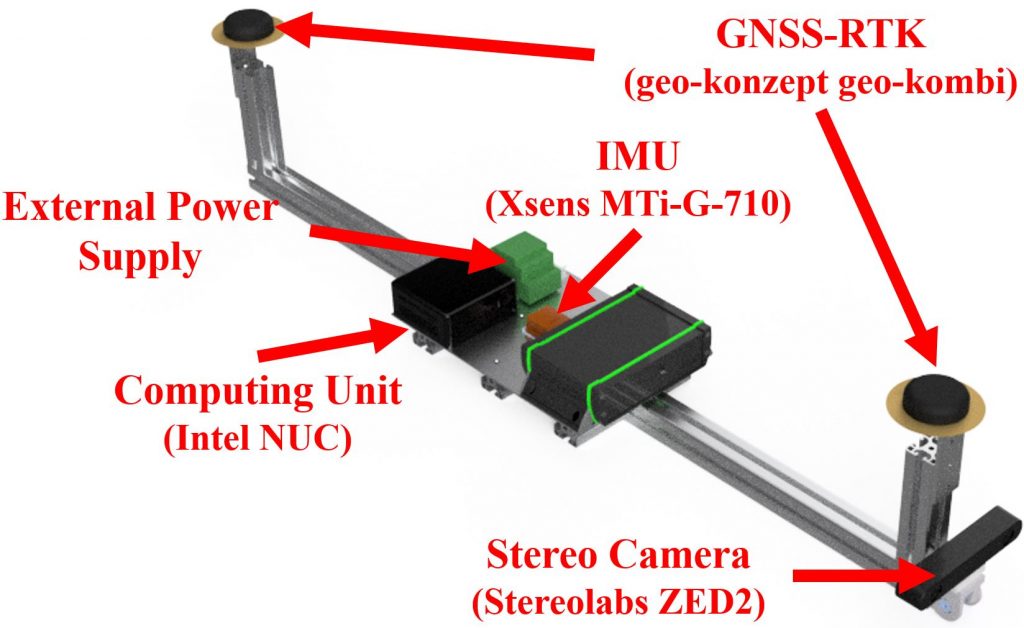
The raw locomotion data is recorded with a universal frame which was mounted on four robots (Mattro Rovo3, Clearpath Robotics Husky, Boston Dynamics Spot, and TU Graz Mercator).

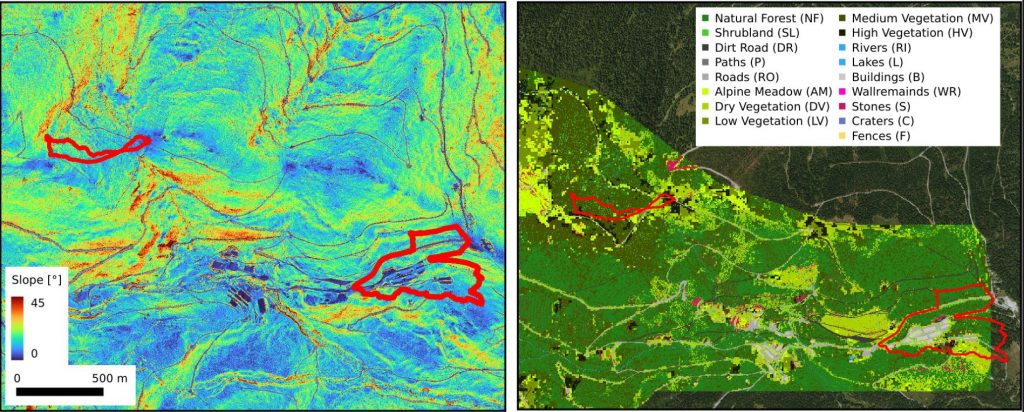
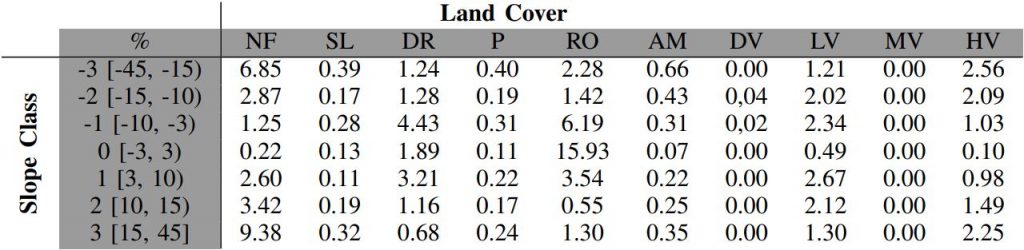
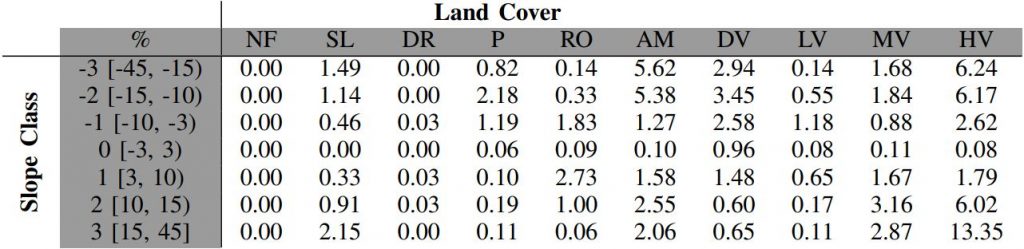
The environment was segmented using two terrain classes. One dimension represents the height profile of the environment while the other dimension represents the land cover class.
The original segmented files can be found here:
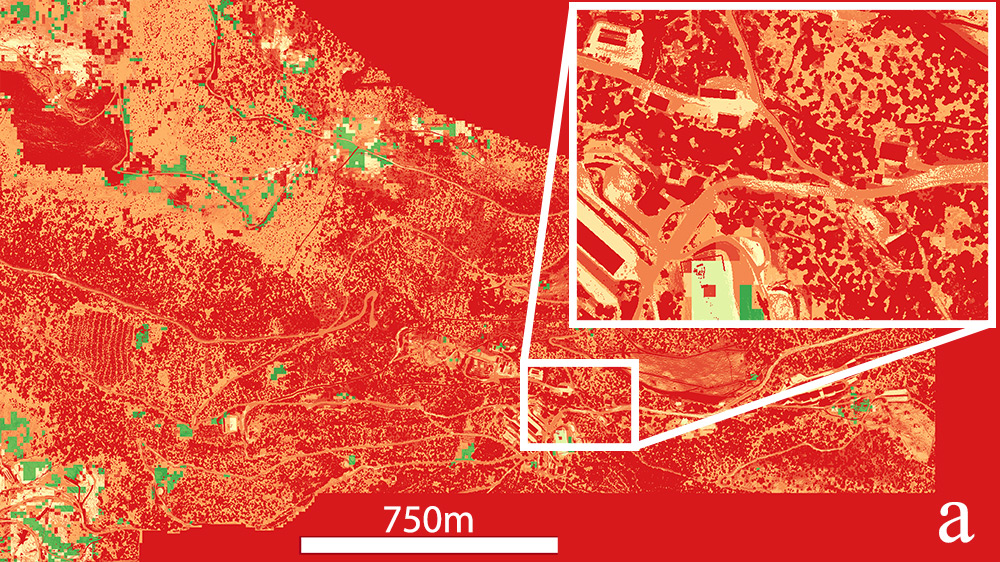
Original Orthogonal Satellite Image
Click the Heading to download the original satellite image. If not working, you can also copy the link here: https://cloud.ist.tugraz.at/nextcloud/index.php/s/364w977c3kkagin
The orthogonal satellite image is geo-referenced on the lower left corner (UTM – EPSG:32633: 466990.4226, 5216356.9441, In Lat/Lon: 47.099894761068455, 14.564997838343139) and has a resolution of 0.5m/px
Original Slope Map
Click the Heading to download the full sized slope map If not working, you can also copy the link here: https://cloud.ist.tugraz.at/nextcloud/index.php/s/mcY7y8LXgC3Eb99
The slope image is geo-referenced on the lower left corner (UTM – EPSG:32633: 466990.4226, 5216356.9441, In Lat/Lon: 47.099894761068455, 14.564997838343139) and has a resolution of 0.5m/px. It is a greyscale image [0,255] in which each value indicates the steepness of the slope (e.g. 0 = 0°, 10 = 10°, 45=45°…)
Original Height Map
Click the Heading to download the full sized slope map If not working, you can also copy the link here: https://cloud.ist.tugraz.at/nextcloud/index.php/s/k2LNoe3KLxX7x9w
The slope image is geo-referenced on the lower left corner (UTM – EPSG:32633: 466990.4226, 5216356.9441, In Lat/Lon: 47.099894761068455, 14.564997838343139) and has a resolution of 0.5m/px. It is a TIF image with 32bit floating point precision values, each indicating the height of the pixel above sea level.
Original Land Cover Map
Click the Heading to download the full sized land cover map with its segmented terrain. If not working, you can also copy the link here: https://cloud.ist.tugraz.at/nextcloud/index.php/s/62WQr6krQKgCxNd
The Land Cover Class Map is geo-referenced on the lower left corner (UTM – EPSG:32633: 466990.4226, 5216356.9441, In Lat/Lon: 47.099894761068455, 14.564997838343139) and has a resolution of 0.5m/px. It is a greyscale image in which the pixel values indicate the following classes:
0... NoData
1... Natural Forest
15... Shrubland
30... Lakes
45... Buildings
60... Wallremainds
75... Stones
90... Craters
105... Fences
120... Dirt Road
135... Paths
150... Roads
165... Alpine Vegetation
180... Dry Vegetation
195... Low Vegetation
210... Medium Vegetation
225... High Vegetation
240... RiversRecorded Routes Information
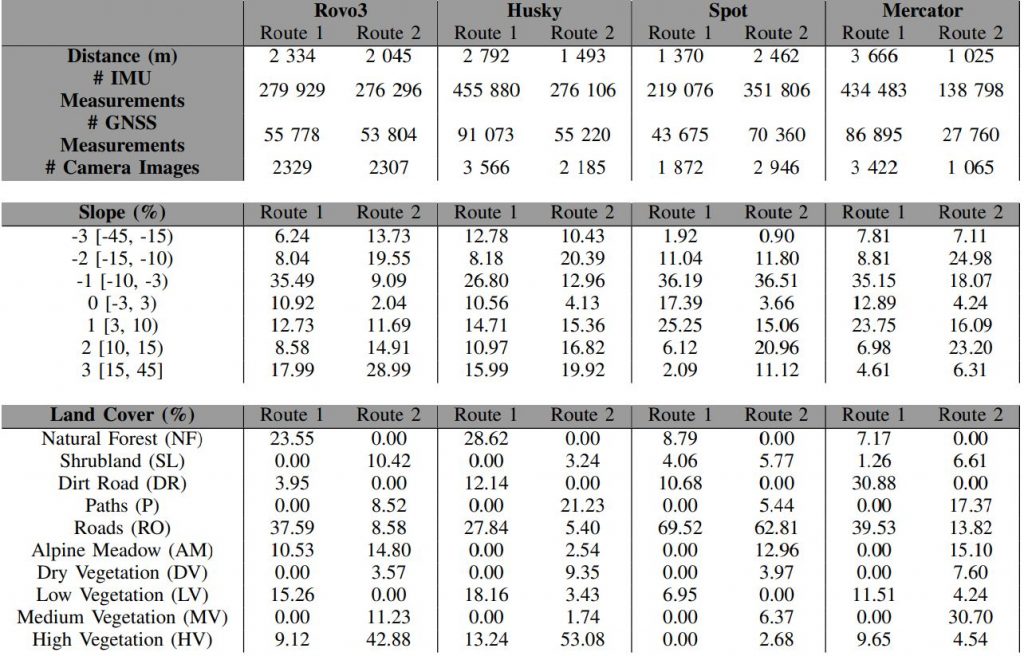
Two standardized paths for the data recording were derived. Route 1 traverses an area (Testarea 1) containing forests, open vegetation, and roads. Route 2 (Testarea 2) is a highly alpine environment above the tree line and provides information on the alpine meadows and various other vegetation types. The two routes, which were traversed with every robot, were planned according to land cover and slope variety as well as their accessibility. The land cover types have been determined using remote sensing with aerial images. For planning, the distribution of land cover types within the test areas was used to determine the most prominent features; Natural Forest (21%) and high vegetation (18%) made up the majority of the terrain, followed by alpine meadows (13%) and low vegetation (13%). Routes were primarily designed to incorporate these features. The mean slope of the full test area is 20.32°, with 50% being slopes larger than 15°.
The route in Testarea 1 was intended to contain Natural Forests with high slopes (>15°) to test the limits of the robotic platforms. It features also a section along a paved road to have a baseline comparison of where traversing should be possible for every robot. Part of the route also goes through low vegetation that was used as a pasture at the time of data collection.
The second route in Testarea 2 was primarily chosen because it contains up to 37% high vegetation and 20% alpine meadows with high slopes; 20% downhill and 19% uphill slopes (>15°).
As the robots are not able to follow the given path exactly or not able to access parts of the route, the number of recorded samples and the distribution of the land cover and slope classes slightly differ. This also shows a number of differences in the recorded lengths, especially for Spot and Mercator.
In Route 1, Spot was only able to drive a small part of the planned route due to overly difficult terrain, resulting in a shortened data recording.
For Mercator, part of Route 1 was blocked by a fence that could not be bypassed. Thus, part of the route had to be backtracked and is therefore covered twice.
Also, the terrain in Route 2 was only passable for Mercator to a limited extent, which resulted in a shortened route being recorded here.
Robot Data Recordings
Here, you can download all the recorded data from the robots in different file formats. We provide three main files for each run and robot:
- A ROS Bagfile, providing the full and original recording of the robot platforms
- Two CSV files, containing the raw sensor information of GNSS (Pose) and IMU (Velcoity, Acceleration), linked to a timestamp.
- A processed CSV file, holding the information to calculate the traversability of the robots’ route
The ROS Bagfiles hold the original data recorded for every robot. It consists of multiple topics , including a TF tree. During the runs, the following topics with the corresponding Message types were recorded:
- /gnss/odom (nav_msgs/Odometry)
- /gnss/pose (geometry_msgs/PoseWithCovarianceStamped)
- /hazard_front/zed_node_front/left_raw/camera_info (sensor_msgs/CameraInfo)
- /hazard_front/zed_node_front/left_raw/image_raw_color (sensor_msgs/Image)
- /hazard_front/zed_node_front/right_raw/camera_info (sensor_msgs/CameraInfo)
- /hazard_front/zed_node_front/right_raw/image_raw_color (sensor_msgs/Image)
- /imu/data (sensor_msgs/Imu)
- /imu/mag (geometry_msgs/Vector3Stamped)
- /map (nav_msgs/OccupancyGrid)
- /map_metadata (nav_msgs/MapMetaData)
- /navsat/fix (sensor_msgs/NavSatFix)
- /navsat/heading (geometry_msgs/QuaternionStamped)
- /navsat/odom (nav_msgs/Odometry)
- /navsat/orientation (geometry_msgs/QuaternionStamped)
- /navsat/vel (geometry_msgs/TwistStamped)
- /odometry (nav_msgs/Odometry)
- /joint_states (sensor_msgs/JointState)
- /tf (tf2_msgs/TFMessage)
- /tf_static (tf2_msgs/TFMessage)
The raw files hold information on the pose (timestamp, longitude, latitude, orientation) and on the IMU acceleration (acceleration_x, acceleration_y, acceleration_z, linear_vel_x, linear_vel_y, linear_vel_z)
The processed files hold the resampled and time-synchronized information of the pose in UTM coordinates, sampled IMU values (average, standard deviation), the extracted locomotion features (velocity, smoothness) and the corresponding terrain classes (land cover type and slope information).
Mattro Rovo3 Recordings
- ROS Bagfile Route 1 (Onboard Video)
- Raw CSV File Route 1 GNSS, IMU
- Processed CSV File Route 1
- ROS Bagfile Route 2 (Onboard Video)
- Raw CSV File Route 2 GNSS, IMU
- Processed CSV File Route 2
Clearpath Robotics Husky Recordings
- ROS Bagfile Route 1 (Onboard Video)
- Raw CSV File Route 1 GNSS, IMU
- Processed CSV File Route 1
- ROS Bagfile Route 2 (Onboard Video)
- Raw CSV File Route 2 GNSS, IMU
- Processed CSV File Route 2
Boston Dynamics Spot Recrodings
Spot has two data recordings for each route, as the battery capacity of the robot was limited and a battery exchange was conducted mid-recording.
- ROS Bagfile Route 1a (Onboard Video)
- Raw CSV File Route 1a GNSS, IMU
- Processed CSV File Route 1
- ROS Bagfile Route 1b (Onboard Video)
- Raw CSV File Route 1b GNSS, IMU
- Processed CSV File Route 1 (Route 1a and 1b are combined into a single processed file)
- ROS Bagfile Route 2a (Onboard Video)
- Raw CSV File Route 2a GNSS, IMU
- Processed CSV File Route 2
- ROS Bagfile Route 2b (Onboard Video)
- Raw CSV File Route 2b GNSS, IMU
- Processed CSV File Route 2 (Route 2a and 2b are combined into a single processed file)
TU Graz Mercator Recordings
- ROS Bagfile Route 1 (Onboard Video)
- Raw CSV File Route 1 GNSS, IMU
- Processed CSV File Route 1
- ROS Bagfile Route 2 (Onboard Video)
- Raw CSV File Route 2 GNSS, IMU
- Processed CSV File Route 2
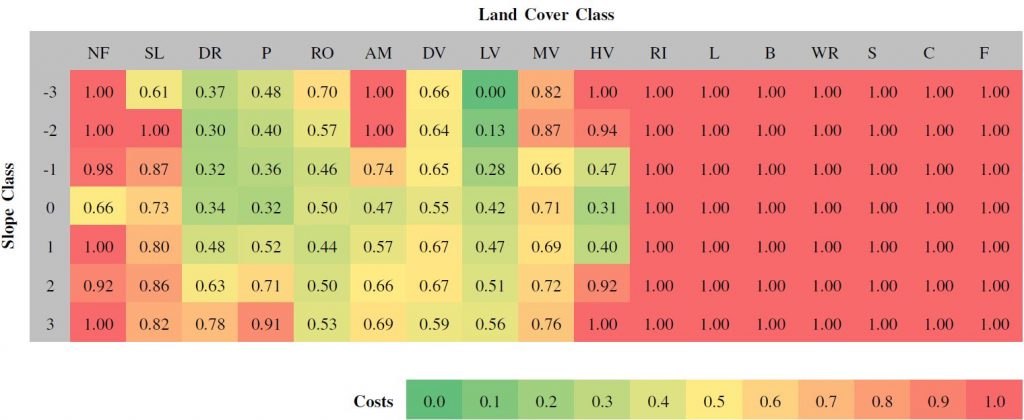
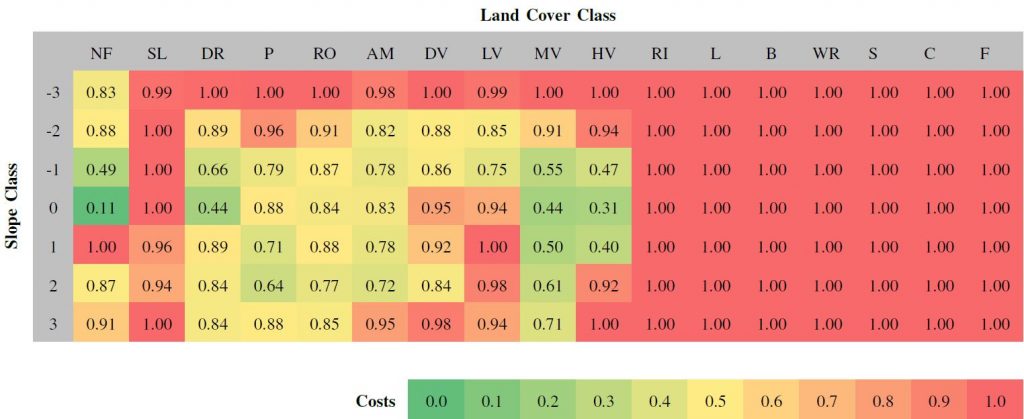
Experimental Results/Supplementary Information
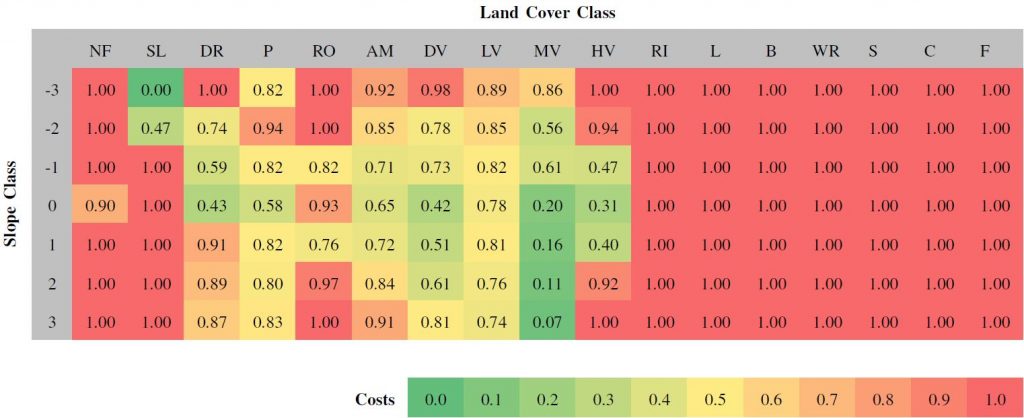
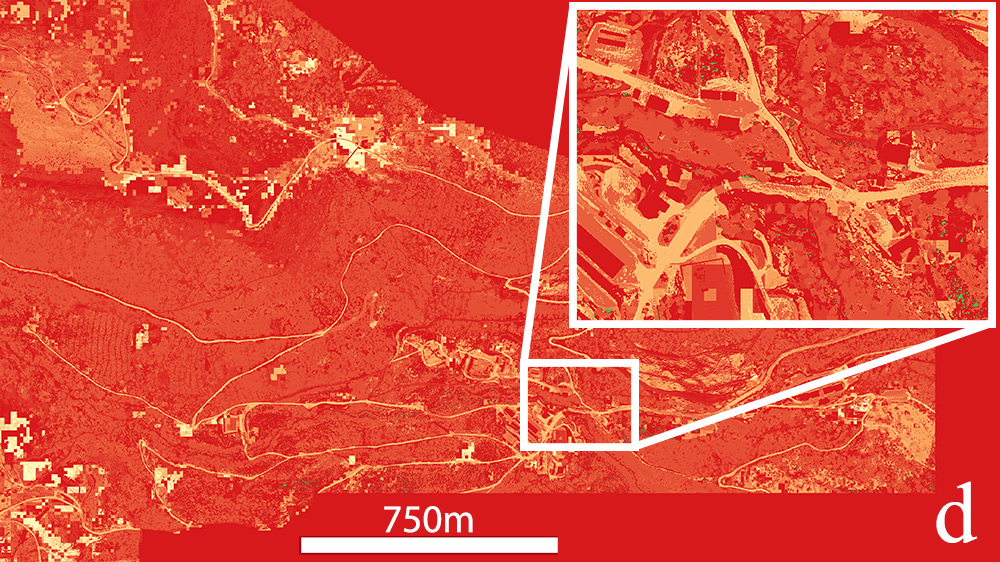
This Section shows supplementary information on the processing of the provided datasets. For all four robot types, traversability analysis was conducted to determine costs that reflect the capabilities of a robot.
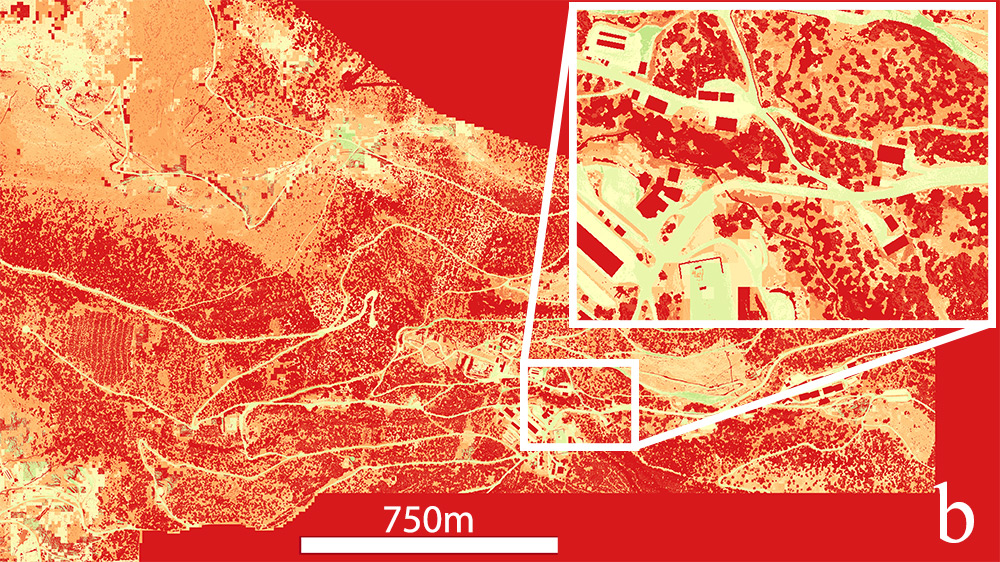
Mattro Rovo3
Click here to download the full sized costmap for Mattro Rovo3 (greyscale, costs scaled from [0,255])
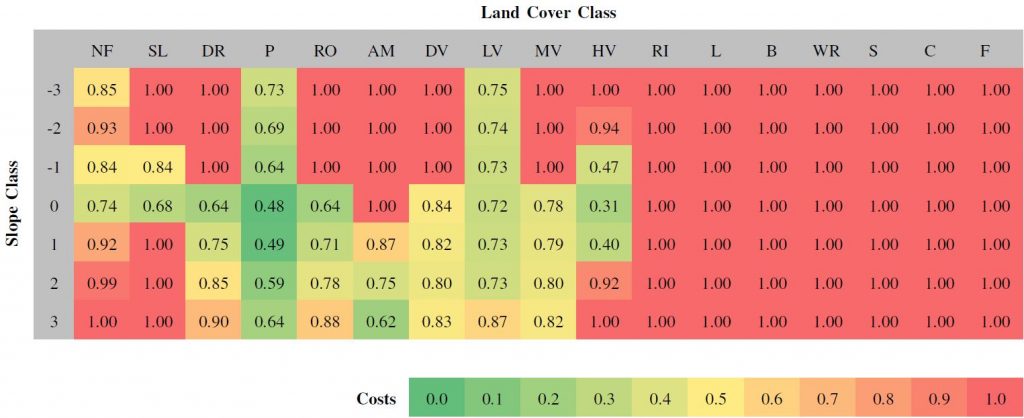
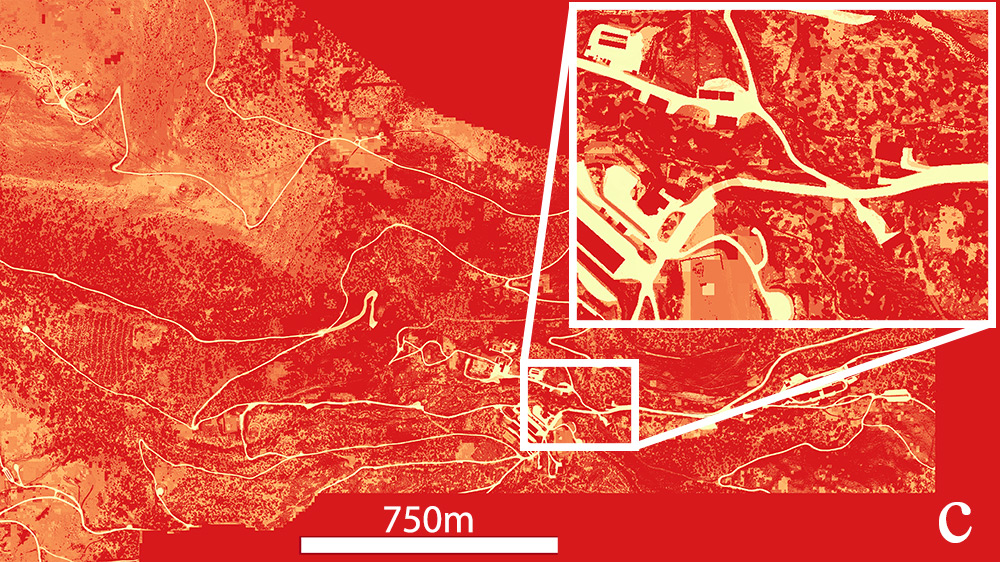
Clearpath Robotics Husky
Click here to download the full sized costmap for Clearpath Robotics Husky (greyscale, costs scaled from [0,255])
Boston Dynamics Spot
Click here to download the full sized costmap for Boston Dynamics Spot (greyscale, costs scaled from [0,255])
TU Graz Mercator
Click here to download the full sized costmap for TU Graz Mercator (greyscale, costs scaled from [0,255])
Reference: Matthias Eder, Raphael Prinz, Florian Schöggl and Gerald Steinbauer-Wagner. Generating Robot-Dependent Cost Maps for Off-Road Environments Using Locomotion Experiments and Earth Observation Data. IEEE Robotic Computing. 2022.
Matthias Eder, Raphael Prinz, Florian Sch öggl and Gerald Steinbauer-Wagner. Traversability analysis for off-road environments using locomotion experiments and earth observation data. Robotics and Autonomous Systems, vol. 168, p. 13, 2023. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0921889023001331